Industrijski roboti kao i coboti upotrebljavaju različite alate pomoću kojih odrađuju zadaću. Budući da se roboti najviše koriste za hvatanje i premještanje proizvoda i predmeta, za to se koriste različiti hvatači. Uglavnom su to pneumatski hvatači za robote (gripperi) koji su primjereni za hvatanje predmeta koji nisu osjetljivi na silu hvatanja i površinska oštečenja koja mogu nastati uslijed manipulacije hvataljkama.
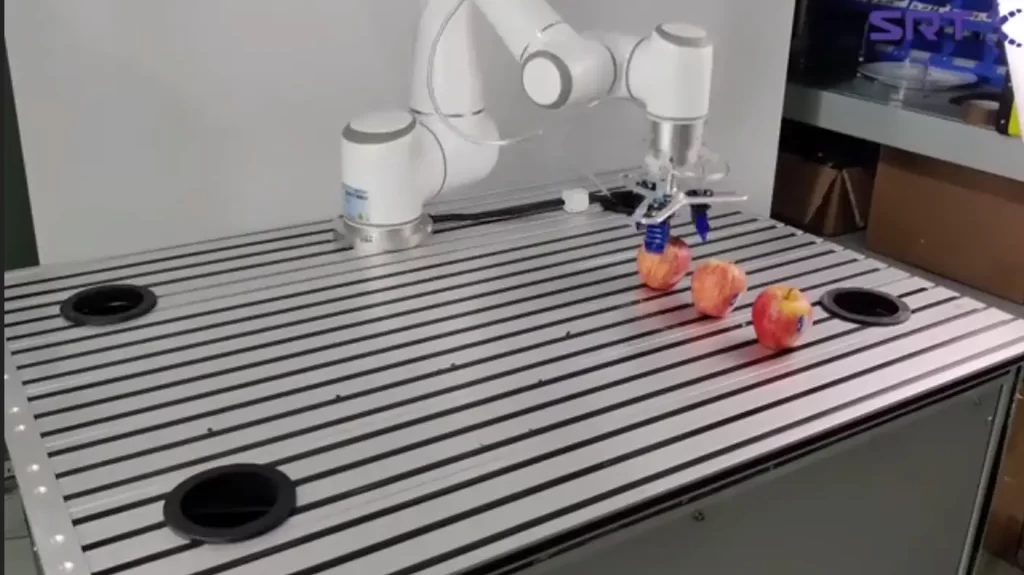
S razvojem kolaborativnih robota (roboti koji imaju ugrađen sustav zaštite za ljude) došlo je i do razvoja suvremenih hvatača (girppera) koji silu hvatanja prilagođavaju predmetu kojeg premještaju. Njihove hvataljke rade na principu pipaka hobotnice. Takvi hvatači su primjereni za sve vrste industrija gdje su proizvodi vrlo osjetljivi na površinska oštečenja uslijed hvatanja i premještanja (prehrambena industrija..). Više o tome možete pogledati u videu koji slijedi. Ukoliko za Vašu aplikaciju trebate mekane hvatače, trebate hvatače za robota koji se mogu prilagoditi obliku proizvoda slobodno nam se javite na jedan od naših kontakata